Submitted by Norm Roulet on Thu, 05/06/2010 - 07:40.
It is 2010.
Time to take lead poisoning eradication into the streets and to each home. I guess that is my destiny.... to grow GRASS:
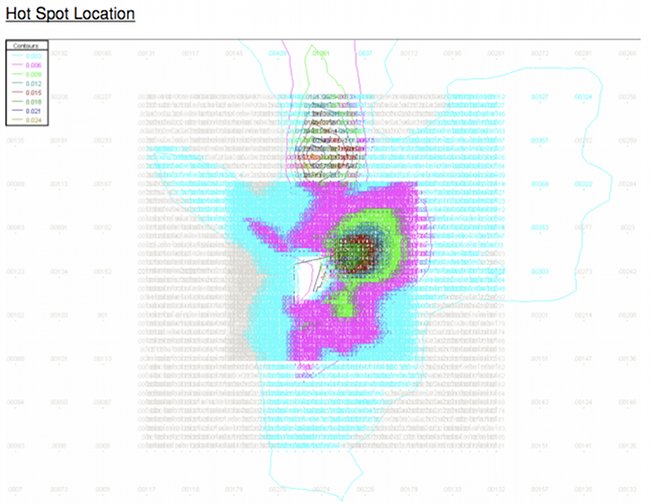
Implementing an open source GIS system (Geographic Information System) is one of the core necessities for eradicating lead poisoning and reducing other environmental harms in Northeast Ohio.
GIS needs lots of computing power. Bigbang Supercomputers are optimized for heavy graphical and computational processing in a lean, scalable cluster/cloud-friendly Linux environment that should be perfectly suited to run open GIS.
Now that we have supercomputers available, let's get mapping for lead poisoning eradication.
The open source GIS system we will be using is GRASS - Geographic Resources Analysis Support System - and it is free/libre, so there are really no barriers to citizens mapping out environmental solutions for the future of real NEO, with state of the art technology and information services available to and for all citizens.
With an open source GIS system for eradicating lead poisoning, and reducing other health hazards in real NEO, we may layer multiple maps and data sources to track lead poisoning and all health hazards by location. We shall have performance metrics and be able to map successes and failures.
We may be able to add the Cuyahoga County landbank properties.
We may be able to track foreclosures in our neighborhoods
We may add layers for other hazards and pollution sources, as well.
Very quickly, with such a free, public mapping system, we will collect enough information to accurately present the environmental conditions of every corner of the region, forecast outcomes from different environmental interventions, and plan solutions to environmental challenges. Such a system will be invaluable in disaster preparedness, as well.
WIth the arrival of the Bigbang on ICEarth, we are prepared to grow GRASS.
If you are experienced with GIS or would like to learn more - and try this out - please raise your voice on realneo or email norm [at] realneo [dot] us
More about GRASS, from their website, where you may download this amazing capability into your own supercomputer, if you have one:
Geographic Resources Analysis Support System, commonly referred to as GRASS GIS, is a Geographic Information System (GIS) used for data management, image processing, graphics production, spatial modeling, and visualization of many types of data. It is Free (Libre) Software/Open Source released under GNU General Public License (GPL). GRASS is official project of the Open Source Geospatial Foundation.
Originally developed by the U.S. Army Construction Engineering Research Laboratories (USA-CERL, 1982-1995), a branch of the US Army Corp of Engineers, as a tool for land management and environmental planning by the military, GRASS has evolved into a powerful utility with a wide range of applications in many different areas of scientific research. GRASS is currently used in academic and commercial settings around the world, as well as many governmental agencies including NASA, NOAA, USDA, DLR, CSIRO, the National Park Service, the U.S. Census Bureau, USGS, and many environmental consulting companies.
The new GRASS 6 release introduces a new topological 2D/3D vector engine and support for vector network analysis. Attributes are now managed in a SQL-based DBMS. A new display manager has been implemented. The NVIZ visualization tool was enhanced to display 3D vector data and voxel volumes. Messages are partially translated (i18N) with support for FreeType fonts, including multibyte Asian characters. New LOCATIONs can be auto-generated by EPSG code number. GRASS is integrated with GDAL/OGR libraries to support an extensive range of raster and vector formats, including OGC-conformal Simple Features.
The GRASS Development Team has grown into a multi-national team consisting of developers at numerous locations.
In September 2006, the GRASS Project Steering Commitee was formed which is responsible for the overall management of the project. The PSC is especially responsible for granting SVN write access.
[see also: | Freshmeat.net entry | Wikipedia entry]
GRASS Features
GRASS (Geographic Resources Analysis Support System) is a raster/vector GIS, image processing system, and graphics production system. GRASS contains over 350 programs and tools to render maps and images on monitor and paper; manipulate raster, vector, and sites data; process multi spectral image data; and create, manage, and store spatial data. GRASS uses both an intuitive windows interface as well as command line syntax for ease of operations. GRASS can interface with commercial printers, plotters, digitizers, and databases to develop new data as well as manage existing data.
GRASS and network support for teams
GRASS supports workgroups through its LOCATION/MAPSET concept which can be set up to share data over NFS (Network File System). Keeping LOCATIONs with their underlying MAPSETs on a central server, a team can simultaneously work in the same project database.
[see also: GRASS capabilities]
GRASS Programming
GRASS is released under GNU GPL, the source code (5.x: more than 1 million lines of C; 6.x 500k SLOC) is completely available. GRASS provides a sophisticated GIS library which can be used for own developments. A GRASS Programmer's Manual is available for download.
[see also: GRASS Development]
Supported platforms
• GRASS is written in ANSI-C and is POSIX compliant : C-API
• A preliminary C++ interface is available
• Architectures: Intel x86, Motorola PPC, SGI MIPS, Sun SPARC, Alpha AXP, HP PA-RISC, CRAY, others.
• Operating systems: GNU/Linux (Intel, PowerPC, Sun, ...) Solaris (SPARC, i86), SGI IRIX, HP UX, Mac OS X (Darwin), IBM AIX, BSD-Unix variants, FreeBSD, CRAY Unicos, iPAQ/Linux handhelds and other UNIX compliant platforms (32/64bit), additionally MS-Windows native or Cygnus.
Source code and selected binaries can be downloaded.
Import/Export: Data formats supported by GRASS
• 2D raster data,
• 3D raster data (voxels),
• topological vector data (2D and 3D)
In detail:
RASTER: The GDAL library (r.in.gdal) is used, see the GDAL project format list for full capabilities. Examples include:
• Raster: ASCII, ARC/GRID, E00, GIF, GMT, TIF, PNG, ERDAS LAN, Vis5D, SURFER (.grd) ...
• Images: CEOS (SAR, SRTM, LANDSAT7 etc.), ERDAS LAN, HDF, LANDSAT TM/MSS, NHAP aerial photos, SAR, SPOT, ... can be read
VECTOR: The OGR library (v.in.ogr) is used, see the OGR project format list. Examples include:
• Vector: ASCII, ARC/INFO ungenerate, ARC/INFO E00, ArcView SHAPE (with topology correction), BIL, DLG (U.S.), DXF, DXF3D, GMT, GPS-ASCII, USGS-DEM, IDRISI, MOSS, MapInfo MIF, TIGER, VRML, ...
• Sites (vector point data lists): XYZ ASCII, CSV, dBase, ...
• List of GRASS raster import and export modules
• List of GRASS vector import and export modules
• List of GRASS volume import and export modules
Data Management capabilities of GRASS
• Spatial analysis
• Map generation
• Data visualization (2D, 2.5D and 3D)
• Data generation through modelling (list of simulation models)
• Link to DBMS (PostgreSQL, mySQL, SQLite, ODBC, ...)
Disrupt IT

